研究概要Research
植物工場研究センターで電動農機・農業ロボットの研究プロジェクトが始動します!
このたび、植物工場研究センターの有馬誠一センター長及び農学研究科食料生産学専攻の上加裕子准教授(兼 植物工場研究センター 准教授)のグループと井関農機株式会社が、2020年度NEDO先導研究プログラム追加公募に採択されました。詳しくはこちら
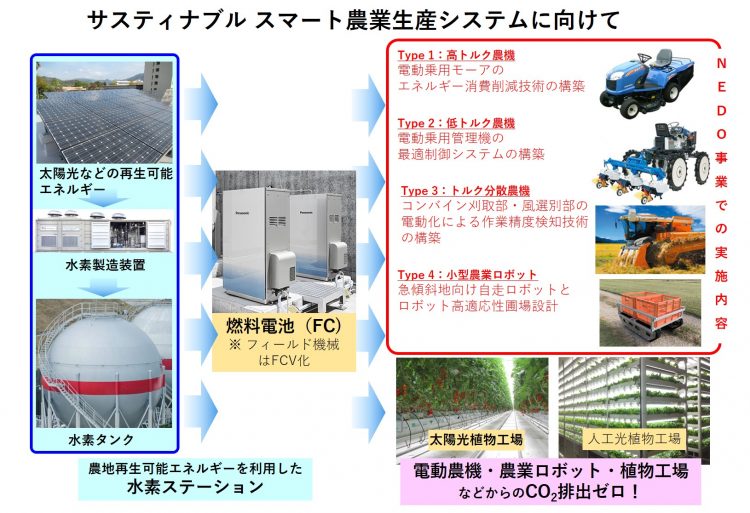
「農山漁村に適した地産地消型エネルギーシステム技術開発、農林業機械・漁船等の電動化及びその普及に資する技術等の開発」の研究開発課題において、「機械負荷制御導入による電動農機・農業ロボットの最適エネルギー・作業管理技術の開発」を実施します。
本研究では、農業機械の電動化に必須となる各種の機械負荷制御技術を構築し、同制御技術を適用することで電動農機の社会実装を促すとともに、急傾斜園地でも安定した自律走行が可能な走行ユニットの開発とロボットが適応しやすい圃場設計を一体的に推し進めるなど、利用環境を強く考慮した研究開発により、ロボット農業システムや電動農業機械の社会実装を確実にすることを目的としています。
急傾斜地のロボット高適応性圃場設計に関しては、農学研究科生物環境学専攻の武山絵美教授、小林範之教授及び愛媛県農林水産研究所と共同実施することとなっています。
これらの研究成果をもとに、農業ロボットを用いたサスティナブルなスマート農業生産システムの展開を目指します。
参考Webサイト
ARG(急傾斜地農業の超省力・高品質生産のための 小型ロボット農業システム研究グループ)
愛媛大学 農学部 食料生産学科 植物工場システム学コース 農業機械システム工学研究室
愛媛大学 農学部 生物環境学科 地域環境工学コース 農村計画学研究室
愛媛大学 農学部 生物環境学科 地域環境工学コース 施設基盤学研究室
2023.02.10
NEDO先導研究プログラムに係る「急傾斜地ロボット農業システム開発」におけるモデル園地走行試験の実施について
愛媛大学植物工場研究センターおよび愛媛大学大学院農学研究科では、愛媛県農林水産研究所、井関農機株式会社と共同で、国立研究開発法人 新エネルギー・産業技術総合開発機構の先導研究プログラム「機械負荷制御導入による電動農機・農業ロボットの最適エネルギー・作業管理技術の開発」に取り組んでいます。
その中で、急傾斜地ロボット農業システムの社会実装を目指し、急傾斜地向け自立走行ロボットの開発と農業ロボットが安全に稼働する園地設計について検証するためのモデル園を農林水産研究所内に整備しました。このモデル園を使用し愛媛大学などが開発した電動台車の走行試験を次のとおり開催します。
日時
令和5年2月14日(火)10:00 頃から(雨天中止)
場所
愛媛県農林水産研究所内 ロボット高適応性モデル園(別紙参照)
内容
電動台車の走行試験
・愛媛大学大学院農学研究科 開発機
・メカロン((株)Doog と農研機構の共同研究成果)
NEDO先導研究プログラムに係る「急傾斜地ロボット農業システム開発」におけるモデル園地走行試験の実施について | プレスリリース | 愛媛大学
プレスリリース資料はこちら(PDF 1,830KB)
お問い合わせ
先端農業R&Dセンター(松山)
(愛媛大学農学部構内)
〒790-8566
愛媛県松山市樽味3丁目5番7号
Tel & FAX:089-946-9901
E-mail:igh@agr.ehime-u.ac.jp
先端農業R&Dセンター(宇和島)
〒798-3303
愛媛県宇和島市津島町近家1651-34
Tel:0895-32-1101

![]()
![]()